CommonInfo.h File Reference
Defines items shared between robot models, like camera specifications. More...
#include <vector>#include <map>#include <set>#include <string>#include <stdexcept>#include "Shared/fmat.h"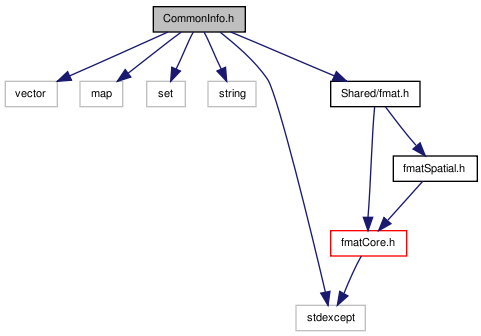

Go to the source code of this file.
Classes | |
| class | RobotInfo::Capabilities |
| Allows behaviors to lookup output/button/sensor names from other models to support basic cross-model portability. More... | |
Namespaces | |
| namespace | CameraGeneric60 |
parameters for a 60° horizontal field of view, 4:3 aspect ratio camera | |
| namespace | Camera75DOF |
parameters for a 75° diagonal field of view, 4:3 aspect ratio camera, like Logitech QuickCam Pro 9000 or Communicate Deluxe | |
| namespace | CameraKinect |
parameters for Microsoft Kinect | |
| namespace | CameraSTX |
parameters for a 42° by 31.5° camera, like Logitech Communicate STX, note that these specifications indicate either a mistake or non-square pixels... | |
| namespace | CameraLifeCam |
parameters for a 66° camera, like the Microsoft LifeCam, with a 16:9 aspect ratio | |
| namespace | RobotInfo |
Contains information about the robot, such as number of joints, PID defaults, timing information, etc. | |
Enumerations | |
| enum | RobotInfo::MinMaxRange_t { RobotInfo::MinRange, RobotInfo::MaxRange } |
Defines the indexes to use as indices to access the min and max entries of joint limit specifications (e.g. ERS7Info::outputRanges and ERS7Info::mechanicalLimits). More... | |
Functions | |
| const char *const | RobotInfo::detectModel () |
| Some target models, such as ERS2xxInfo, may be dual-booting compatability modes. This function returns the actual robot name (e.g. ERS210Info::TargetName or ERS220Info::TargetName). | |
Variables | |
| const float | CameraGeneric60::CameraHorizFOV = 60*(float)M_PI/180 |
| horizontal field of view (radians) | |
| const float | CameraGeneric60::CameraVertFOV = 0.8172757101952f |
| vertical field of view (radians): 2*atan( tan(60°/2) * 3/4 ) = 46.83° | |
| const float | CameraGeneric60::CameraFOV = CameraHorizFOV |
| should be set to maximum of CameraHorizFOV or CameraVertFOV | |
| const unsigned int | CameraGeneric60::CameraResolutionX = 640 |
| the number of pixels available in the 'full' layer | |
| const unsigned int | CameraGeneric60::CameraResolutionY = 480 |
| the number of pixels available in the 'full' layer | |
| const char | CameraGeneric60::CameraModelName [] = "Generic60" |
| specifies a name of the camera to load calibration parameters into RobotInfo::CameraHomography | |
| const float | Camera75DOF::CameraHorizFOV = 1.1010990963f |
| horizontal field of view (radians) | |
| const float | Camera75DOF::CameraVertFOV = 0.8629313824f |
| vertical field of view (radians) | |
| const float | Camera75DOF::CameraFOV = CameraHorizFOV |
| should be set to maximum of CameraHorizFOV or CameraVertFOV | |
| const unsigned int | Camera75DOF::CameraResolutionX = 640 |
| the number of pixels available in the 'full' layer | |
| const unsigned int | Camera75DOF::CameraResolutionY = 480 |
| the number of pixels available in the 'full' layer | |
| const char | Camera75DOF::CameraModelName [] = "QuickCam-Pro-9000" |
| specifies a name of the camera to load calibration parameters into RobotInfo::CameraHomography | |
| const float | CameraKinect::CameraHorizFOV = 1.01229097f |
| horizontal field of view (radians) | |
| const float | CameraKinect::CameraVertFOV = 0.785398163f |
| vertical field of view (radians) | |
| const float | CameraKinect::CameraFOV = CameraHorizFOV |
| should be set to maximum of CameraHorizFOV or CameraVertFOV | |
| const unsigned int | CameraKinect::CameraResolutionX = 640 |
| the number of pixels available in the 'full' layer | |
| const unsigned int | CameraKinect::CameraResolutionY = 480 |
| the number of pixels available in the 'full' layer | |
| const char | CameraKinect::CameraModelName [] = "Kinect-Camera" |
| specifies a name of the camera to load calibration parameters into RobotInfo::CameraHomography | |
| const float | CameraSTX::CameraHorizFOV = 0.7330382858f |
| horizontal field of view (radians) | |
| const float | CameraSTX::CameraVertFOV = 0.5497787144f |
| vertical field of view (radians) | |
| const float | CameraSTX::CameraFOV = CameraHorizFOV |
| should be set to maximum of CameraHorizFOV or CameraVertFOV | |
| const unsigned int | CameraSTX::CameraResolutionX = 640 |
| the number of pixels available in the 'full' layer | |
| const unsigned int | CameraSTX::CameraResolutionY = 480 |
| the number of pixels available in the 'full' layer | |
| const char | CameraSTX::CameraModelName [] = "QuickCam-STX" |
| specifies a name of the camera to load calibration parameters into RobotInfo::CameraHomography | |
| const float | CameraLifeCam::CameraHorizFOV = 1.03010024717f |
| horizontal field of view (radians) | |
| const float | CameraLifeCam::CameraVertFOV = 0.61646432538f |
| vertical field of view (radians) | |
| const float | CameraLifeCam::CameraFOV = CameraHorizFOV |
| should be set to maximum of CameraHorizFOV or CameraVertFOV | |
| const unsigned int | CameraLifeCam::CameraResolutionX = 1280 |
| the number of pixels available in the 'full' layer | |
| const unsigned int | CameraLifeCam::CameraResolutionY = 720 |
| the number of pixels available in the 'full' layer | |
| const char | CameraLifeCam::CameraModelName [] = "LifeCam-HD-5000" |
| specifies a name of the camera to load calibration parameters into RobotInfo::CameraHomography | |
| const char *const | RobotInfo::RobotName = detectModel() |
| Name of the robot which is actually running. | |
Detailed Description
Defines items shared between robot models, like camera specifications.
Definition in file CommonInfo.h.