Config.h File Reference
Describes Config, which provides global access to system configuration information. More...
#include "Shared/plist.h"#include "Shared/string_util.h"#include "Shared/RobotInfo.h"#include <jpeglib.h>#include <vector>#include <string>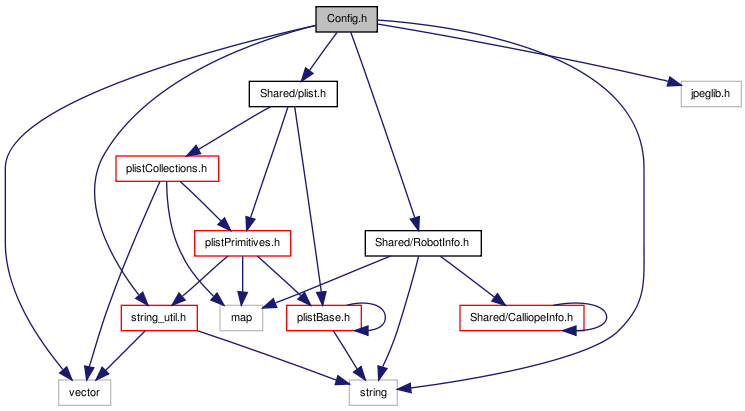
Go to the source code of this file.
Classes | |
| class | ConfigDictionary |
| a subclass of plist::Dictionary which adds support for filtering settings by robot model, each configuration section is based on this More... | |
| class | OutputConfig< T > |
| Stores an item for each joint, can be accessed via joint name or array offset. More... | |
| class | Config |
| the root configuration object, provides some global functionality like porting pathnames (portPath()) More... | |
| class | Config::behaviors_config |
| place for users to put their own configuration More... | |
| class | Config::wireless_config |
| wireless configuration options More... | |
| class | Config::main_config |
| general configuration options More... | |
| class | Config::controller_config |
| controller information More... | |
| class | Config::vision_config |
| vision configuration options (this is a *big* section, with sub-sections) More... | |
| class | Config::vision_config::StreamingConfig |
| contains settings related to streaming video over the network More... | |
| class | Config::vision_config::RawCamConfig |
| contains settings specific to the "RawCam" (original camera images) for streaming video over the network More... | |
| class | Config::vision_config::DepthCamConfig |
| class | Config::vision_config::SegCamConfig |
| contains settings specific to the "SegCam" (segmented color images) for streaming video over the network More... | |
| class | Config::vision_config::RegionCamConfig |
| contains settings specific to the "RegionCam" (only display a box for each blob of color) for streaming over the network More... | |
| class | Config::motion_config |
| motion information More... | |
| class | Config::sound_config |
| sound information More... | |
| class | Config::sound_config::streaming_config |
| audio streaming configuration More... | |
Typedefs | |
| typedef unsigned int | OSpeakerVolume |
| provides an OPEN-R type of the same name for compatability, see Config::sound_config::volume | |
Variables | |
| const OSpeakerVolume | ospkvolinfdB = 0x8000 |
| 'muted' volume level, see Config::sound_config::volume | |
| const OSpeakerVolume | ospkvol25dB = 0xe700 |
| low volume, see Config::sound_config::volume | |
| const OSpeakerVolume | ospkvol18dB = 0xee00 |
| mid volume, see Config::sound_config::volume | |
| const OSpeakerVolume | ospkvol10dB = 0xf600 |
| high volume, see Config::sound_config::volume | |
| Config * | config |
| allows global access to current settings | |
Detailed Description
Describes Config, which provides global access to system configuration information.
Definition in file Config.h.
Typedef Documentation
| typedef unsigned int OSpeakerVolume |
provides an OPEN-R type of the same name for compatability, see Config::sound_config::volume
Variable Documentation
allows global access to current settings
Definition at line 46 of file Config.cc.
Referenced by HelpControl::activate(), WorldState::applyCalibration(), RawCameraGenerator::calcImage(), JPEGGenerator::calcImage(), SensorObserverControl::checkLogFile(), EventLogger::checkLogFile(), ControlBase::clearMenu(), Controller::console_callback(), SoundManager::CopyTo(), ControlBase::deactivate(), PostureMC::defaultMaxSpeed(), HeadPointerMC::defaultMaxSpeed(), ControlBase::doCancel(), WorldStateSerializerBehavior::doEvent(), SegCam::doEvent(), RegionCam::doEvent(), RawCameraGenerator::doEvent(), RawCam::doEvent(), DepthCam::doEvent(), CameraBehavior::doEvent(), BallDetectionGenerator::doEvent(), ControlBase::doNextItem(), ControlBase::doPrevItem(), ControlBase::doReadStdIn(), WaypointWalkControl::WaypointEditControl::doSelect(), WaypointWalkControl::doSelect(), WalkCalibration::doSelect(), SensorObserverControl::doSelect(), EventLogger::doSelect(), ControlBase::doSelect(), WorldStateSerializerBehavior::doStart(), WMMonitorBehavior::doStart(), HeadController::doStart(), FlashIPAddrBehavior::doStart(), EStopController::doStart(), Controller::doStart(), ArmController::doStart(), Controller::doStop(), RawCam::drawShapesIntoBuffer(), SoundManager::endPlay(), WalkCalibration::err(), DualCoding::Lookout::findLocationFor(), GaitedFootstepMC::GaitedFootstepMC(), WorldStateSerializerBehavior::getClassDescription(), WMMonitorBehavior::getClassDescription(), WalkController::getClassDescription(), UPennWalkControllerBehavior::getClassDescription(), SegCam::getClassDescription(), RegionCam::getClassDescription(), RawCam::getClassDescription(), HeadController::getClassDescription(), GamepadController::getClassDescription(), EStopController::getClassDescription(), DepthCam::getClassDescription(), ArmController::getClassDescription(), CameraBehavior::getNextName(), MotionManager::getOutputs(), WorldStateSerializerBehavior::getPort(), WMMonitorBehavior::getPort(), Aibo3DControllerBehavior::getPort(), SoundManager::getRemainTime(), RawCam::getSourceLayer(), Kinematics::init(), ConfigurationEditor::init(), CameraBehavior::initIndex(), PitchDetector::is_pitch(), DualCoding::MapBuilder::isLineVisible(), DualCoding::MapBuilder::isPointVisible(), SoundManager::loadBuffer(), CameraData::loadCameraData(), SegmentedColorGenerator::loadColorInfo(), WaypointEngine::loadFile(), SoundManager::loadFile(), PostureEngine::loadFile(), MotionSequenceEngine::loadFile(), KoduConfig::loadFile(), SegmentedColorGenerator::loadThresholdMap(), CameraBehavior::openNextFile(), RawCam::openPacket(), DepthCam::openPacket(), SoundManager::playFile(), PostureEditor::PostureEditor(), WalkCalibration::processEvent(), projectShapeToCamera(), Kinematics::projectToGround(), WorldState::read(), WaypointWalkControl::refresh(), PostureEditor::refresh(), ControlBase::refresh(), SoundManager::release(), SoundManager::releaseFile(), HelpControl::report(), CameraData::saveCameraData(), WalkCalibration::saveData(), WaypointEngine::saveFile(), PostureEngine::saveFile(), MotionSequenceEngine::saveFile(), LoadCalibration::selectedFile(), CameraStreamBehavior::sendSensors(), Controller::setConfig(), ControlBase::setHilights(), FileBrowserControl::setRoot(), EmergencyStopMC::setStopped(), FlashIPAddrBehavior::setupSequence(), SegCam::setupServer(), RegionCam::setupServer(), RawCam::setupServer(), DepthCam::setupServer(), SoundManager::speak(), GamepadController::start(), SoundManager::stopPlay(), WalkCalibration::takeInput(), SaveWalkControl::takeInput(), SavePostureControl::takeInput(), ControlBase::takeInput(), BallDetectionGenerator::testSendEvent(), WaypointWalkControl::WaypointWalkControl(), RawCam::writeColor(), DepthCam::writeDepth(), RegionCam::writeRegions(), SegCam::writeRLE(), SegCam::writeSeg(), RawCam::writeSingleChannel(), XWalkEdit::XWalkEdit(), and XWalkMC::XWalkMC().
| const OSpeakerVolume ospkvol10dB = 0xf600 |
high volume, see Config::sound_config::volume
| const OSpeakerVolume ospkvol18dB = 0xee00 |
mid volume, see Config::sound_config::volume
| const OSpeakerVolume ospkvol25dB = 0xe700 |
low volume, see Config::sound_config::volume
| const OSpeakerVolume ospkvolinfdB = 0x8000 |
'muted' volume level, see Config::sound_config::volume