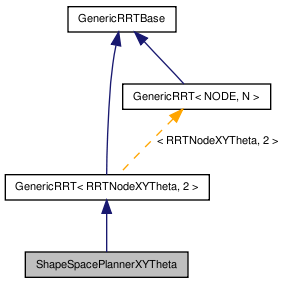
ShapeSpacePlannerXYTheta Class Reference
Plans a path in a 2D linear space with smooth angle changes (if turnLimit is small), using multiple bounding boxes for collision checking. More...
#include <ShapeSpacePlannerXYTheta.h>
Detailed Description
Plans a path in a 2D linear space with smooth angle changes (if turnLimit is small), using multiple bounding boxes for collision checking.
Definition at line 79 of file ShapeSpacePlannerXYTheta.h.
Public Types | |
| typedef RRTNodeXYTheta | NodeType_t |
| typedef NodeType_t::NodeValue_t | NodeValue_t |
Public Member Functions | |
| ShapeSpacePlannerXYTheta (DualCoding::ShapeSpace &shs, const DualCoding::Shape< DualCoding::PolygonData > &worldBounds=Shape< PolygonData >(), float inflation=0) | |
| virtual | ~ShapeSpacePlannerXYTheta () |
| virtual void | initialize (const NodeValue_t &start, std::vector< NodeType_t > &treeStartResult, const NodeValue_t &end, std::vector< NodeType_t > &treeEndResult) |
| Set up initial search trees. | |
| AngTwoPi | tangentHeading (const NodeValue_t &start, const NodeValue_t &end) const |
| Calculate the heading necessary to point the baseOffset at the target. | |
| virtual void | buildPath (const std::vector< NodeType_t > *treeStart, const std::vector< NodeType_t > *treeEnd, std::vector< NodeValue_t > &path) |
| GenericRRTBase::PlannerResult2D | planPath (const Point &startPoint, const fmat::Column< 3 > &_baseOffset, float gateLength, const Point &endPoint, const AngTwoPi initialHeading, const AngTwoPi _targetHeading, unsigned int _maxIterations=4000, std::vector< NodeValue_t > *pathResult=NULL, std::vector< NodeType_t > *treeStartResult=NULL, std::vector< NodeType_t > *treeEndResult=NULL) |
| Plan a robot path from startPoint to endPoint with optional targetHeading at the end. | |
Static Public Member Functions | |
| static void | plotPath (const std::vector< NodeValue_t > &path, Shape< GraphicsData > &graphics, rgb color=rgb(0, 0, 255)) |
| static void | plotTree (const std::vector< NodeType_t > &tree, Shape< GraphicsData > &graphics, rgb color=rgb(0, 0, 255)) |
Static Public Attributes | |
| static unsigned int const | numDivisions = 18 |
| Number of divisions of the circle to try when targetHeading unspecified. | |
Private Attributes | |
| float | targetHeading |
| Set by planPath() and used by initialize(). | |
| fmat::Column< 3 > | baseOffset |
| Set by planPath() and used by initialize(). | |
| float | gateLength |
| Set by planPath() and used by initialize(). | |
Member Typedef Documentation
Definition at line 81 of file ShapeSpacePlannerXYTheta.h.
Reimplemented from GenericRRT< RRTNodeXYTheta, 2 >.
Definition at line 82 of file ShapeSpacePlannerXYTheta.h.
Constructor & Destructor Documentation
| ShapeSpacePlannerXYTheta::ShapeSpacePlannerXYTheta | ( | DualCoding::ShapeSpace & | shs, | |
| const DualCoding::Shape< DualCoding::PolygonData > & | worldBounds = Shape< PolygonData >(), |
|||
| float | inflation = 0 | |||
| ) |
| virtual ShapeSpacePlannerXYTheta::~ShapeSpacePlannerXYTheta | ( | ) | [virtual] |
Definition at line 88 of file ShapeSpacePlannerXYTheta.h.
Member Function Documentation
| void ShapeSpacePlannerXYTheta::buildPath | ( | const std::vector< NodeType_t > * | treeStart, | |
| const std::vector< NodeType_t > * | treeEnd, | |||
| std::vector< NodeValue_t > & | path | |||
| ) | [virtual] |
Reimplemented from GenericRRT< RRTNodeXYTheta, 2 >.
Definition at line 270 of file ShapeSpacePlannerXYTheta.cc.
| void ShapeSpacePlannerXYTheta::initialize | ( | const NodeValue_t & | start, | |
| std::vector< NodeType_t > & | treeStartResult, | |||
| const NodeValue_t & | end, | |||
| std::vector< NodeType_t > & | treeEndResult | |||
| ) | [virtual] |
Set up initial search trees.
Reimplemented from GenericRRT< RRTNodeXYTheta, 2 >.
Definition at line 214 of file ShapeSpacePlannerXYTheta.cc.
| GenericRRTBase::PlannerResult2D ShapeSpacePlannerXYTheta::planPath | ( | const Point & | startPoint, | |
| const fmat::Column< 3 > & | _baseOffset, | |||
| float | gateLength, | |||
| const Point & | endPoint, | |||
| const AngTwoPi | initialHeading, | |||
| const AngTwoPi | _targetHeading, | |||
| unsigned int | _maxIterations = 4000, |
|||
| std::vector< NodeValue_t > * | pathResult = NULL, |
|||
| std::vector< NodeType_t > * | treeStartResult = NULL, |
|||
| std::vector< NodeType_t > * | treeEndResult = NULL | |||
| ) |
Plan a robot path from startPoint to endPoint with optional targetHeading at the end.
- Parameters:
-
startPoint Starting location of the robot baseOffset Offset from the base frame, e.g., if we want a path that brings the gripper (rather than the base) to a particular location endPoint Desired ending point initialHeading The robot's heading at the start of the path targetHeading Desired final heading; if unspecified, the planner generates a collection of possible target headings to try for maxIterations Maximum number of iterations for the RRT to search before giving up pathResult Stores the final, smoothed path computed by the planner treeStartResult Stores the start search tree; only used for debugging or teaching treeEndResult Stores the end search tree; only used for debugging or teaching
Definition at line 384 of file ShapeSpacePlannerXYTheta.cc.
Referenced by Grasper::planBodyPath().
| void ShapeSpacePlannerXYTheta::plotPath | ( | const std::vector< NodeValue_t > & | path, | |
| Shape< GraphicsData > & | graphics, | |||
| rgb | color = rgb(0,0,255) | |||
| ) | [static] |
Definition at line 429 of file ShapeSpacePlannerXYTheta.cc.
| void ShapeSpacePlannerXYTheta::plotTree | ( | const std::vector< NodeType_t > & | tree, | |
| Shape< GraphicsData > & | graphics, | |||
| rgb | color = rgb(0,0,255) | |||
| ) | [static] |
Definition at line 439 of file ShapeSpacePlannerXYTheta.cc.
Referenced by Grasper::planBodyPath().
| AngTwoPi ShapeSpacePlannerXYTheta::tangentHeading | ( | const NodeValue_t & | start, | |
| const NodeValue_t & | end | |||
| ) | const |
Calculate the heading necessary to point the baseOffset at the target.
This is the slope of the tangent line from the target to a circle centered on the baseFrame with radius equal to the y component of the baseOffset.
Definition at line 253 of file ShapeSpacePlannerXYTheta.cc.
Referenced by initialize().
Member Data Documentation
fmat::Column<3> ShapeSpacePlannerXYTheta::baseOffset [private] |
Set by planPath() and used by initialize().
Definition at line 142 of file ShapeSpacePlannerXYTheta.h.
Referenced by initialize(), planPath(), and tangentHeading().
float ShapeSpacePlannerXYTheta::gateLength [private] |
Set by planPath() and used by initialize().
Definition at line 143 of file ShapeSpacePlannerXYTheta.h.
Referenced by initialize(), and planPath().
unsigned int const ShapeSpacePlannerXYTheta::numDivisions = 18 [static] |
Number of divisions of the circle to try when targetHeading unspecified.
Definition at line 104 of file ShapeSpacePlannerXYTheta.h.
Referenced by initialize().
float ShapeSpacePlannerXYTheta::targetHeading [private] |
Set by planPath() and used by initialize().
Definition at line 141 of file ShapeSpacePlannerXYTheta.h.
Referenced by buildPath(), initialize(), and planPath().
The documentation for this class was generated from the following files: