TorqueCalibrate.h File Reference
Defines TorqueCalibrate, which provides an interface for making measurements to correlate PID duty cycle and actual force output for each of the motors. More...
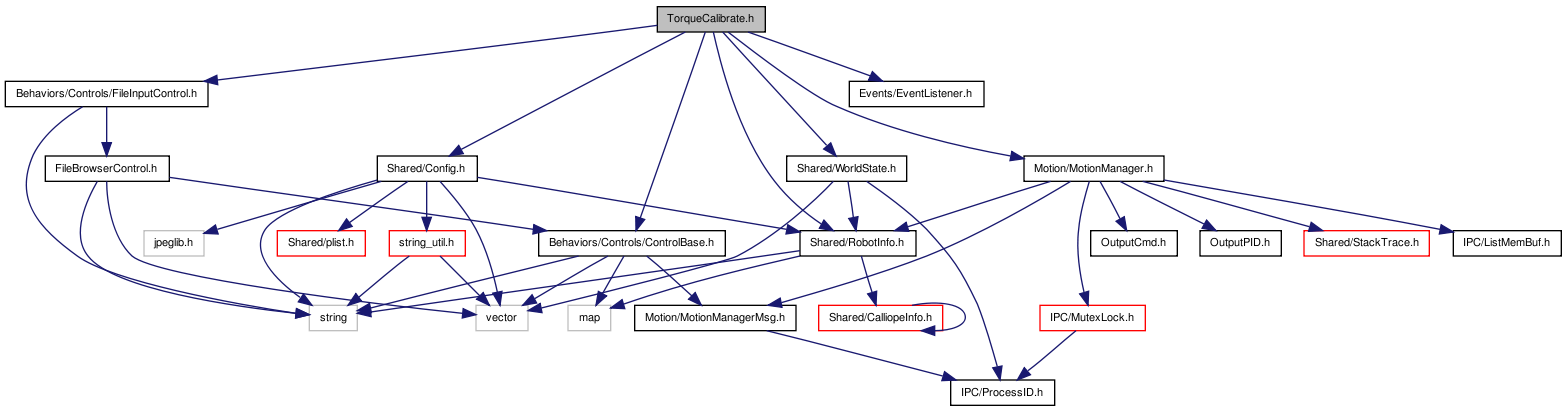
#include "Shared/RobotInfo.h"#include "Behaviors/Controls/ControlBase.h"#include "Behaviors/Controls/FileInputControl.h"#include "Motion/MotionManager.h"#include "Events/EventListener.h"#include "Shared/Config.h"#include "Shared/WorldState.h"
Include dependency graph for TorqueCalibrate.h:
Go to the source code of this file.
Classes | |
| class | TorqueCalibrate |
| Provides an interface for making measurements to correlate PID duty cycle and actual force output for each of the motors. More... | |
| class | TorqueCalibrate::TakeMeasurementControl |
Detailed Description
Defines TorqueCalibrate, which provides an interface for making measurements to correlate PID duty cycle and actual force output for each of the motors.
Definition in file TorqueCalibrate.h.