Kinematics.h File Reference
Describes Kinematics, which provides access to the mathematical functionality of the roboop package using Tekkotsu data structures. More...
#include "Shared/RobotInfo.h"#include "Shared/fmat.h"#include "Shared/Measures.h"#include "Motion/KinematicJoint.h"#include <string>#include <vector>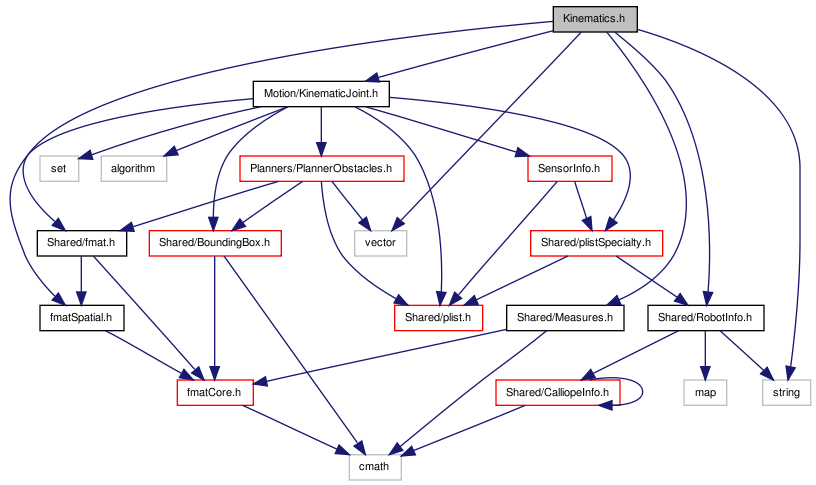

Go to the source code of this file.
Classes | |
| class | Kinematics |
| Forward and inverse kinematics calculations using Tekkotsu output indices. More... | |
| struct | Kinematics::InterestPoint |
| holds the position and attached link of a given interest point More... | |
Variables | |
| Kinematics * | kine |
| a global instance of Kinematics, joint values reference those of WorldState so users can easily query the current spatial locations of joints | |
Detailed Description
Describes Kinematics, which provides access to the mathematical functionality of the roboop package using Tekkotsu data structures.
Definition in file Kinematics.h.
Variable Documentation
a global instance of Kinematics, joint values reference those of WorldState so users can easily query the current spatial locations of joints
Definition at line 18 of file Kinematics.cc.
Referenced by ArmController::ArmController(), DualCoding::MapBuilder::calculateGroundPlane(), CBracketGrasperPredicate< N >::CBracketGrasperPredicate(), RRTNode3DR< N >::CollisionChecker::CollisionChecker(), RRTNode2DR< N >::CollisionChecker::CollisionChecker(), Grasper::computeGoalStates(), XWalkParameters::computeNeutralPos(), LookAtMarkers::Search::doEvent(), LookAtMarkers::TrackMarker::doEvent(), KoduInterpreter::GiveActionRunner::GiveActionSend::doStart(), KoduInterpreter::GrabActionRunner::ExecuteGrabAction::PrepareForAnotherGrasp::RepositionBody::doStart(), KoduInterpreter::GrabActionRunner::ExecuteGrabAction::VerifyObjectWasGrabbed::VerifyObjectInGripper::doStart(), KoduInterpreter::GrabActionRunner::ExecuteGrabAction::VerifyObjectWasGrabbed::LookAtTheGripper::doStart(), KoduInterpreter::PerceptualMultiplexor::FailureRecovery::ObjectManipRecovery::PrepareForAnotherGrasp::RepositionBody::doStart(), KoduInterpreter::PerceptualMultiplexor::FailureRecovery::ObjectManipRecovery::VerifyObjectWasGrabbed::VerifyObjectInGripper::doStart(), KoduInterpreter::PerceptualMultiplexor::FailureRecovery::ObjectManipRecovery::VerifyObjectWasGrabbed::LookAtTheGripper::doStart(), Grasper::ReleaseArm::doStart(), Grasper::PlanBodyTransport::doStart(), Grasper::ArmRaise::doStart(), Grasper::ArmNudge::doStart(), Grasper::Verify::CheckCross::doStart(), Grasper::Verify::CheckDomino::doStart(), Grasper::DoBodyApproach3::doStart(), Grasper::DoBodyApproach2::doStart(), Grasper::PlanArmApproach::doStart(), ArmController::doStart(), RawCam::drawShapesIntoBuffer(), Grasper::MoveArm::executeMove(), DualCoding::Lookout::findLocationFor(), DualCoding::MapBuilder::getCamCrosses(), DualCoding::MapBuilder::getCamCylinders(), DualCoding::MapBuilder::getCamDominoes(), Grasper::getCurrentState(), DualCoding::MapBuilder::grabCameraImageAndGo(), IKCalliope::IKCalliope(), HeadPointerMC::lookAtJoint(), HeadPointerMC::lookAtPoint(), HeadPointerMC::lookInDirection(), ArmMC::moveOffsetToPoint(), ArmMC::moveOffsetToPointWithOrientation(), ArmController::pointPicked(), DualCoding::Lookout::processPointAtEvent(), DualCoding::Lookout::processSearchEvent(), projectShapeToCamera(), DualCoding::MapBuilder::projectToLocal(), ArmController::setJoint(), DualCoding::Lookout::setupTrack(), ShapeSpaceCollisionCheckerBase< N >::ShapeSpaceCollisionCheckerBase(), ShapeSpacePlanner2DR< N >::ShapeSpacePlanner2DR(), and ShapeSpacePlanner3DR< N >::ShapeSpacePlanner3DR().