CommonERSInfo.h File Reference
Defines some capabilities common to all Aibo robots. More...
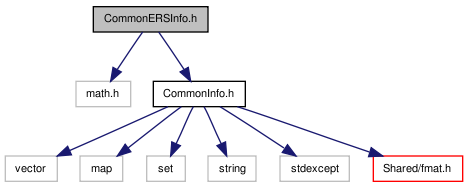
#include <math.h>#include "CommonInfo.h"
Include dependency graph for CommonERSInfo.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | CameraERS2xx |
Typedefs | |
| typedef unsigned short | word |
| otherwise defined in Types.h | |
Variables | |
| const float | CameraERS2xx::CameraHorizFOV = 57.6f/180*static_cast<float>(M_PI) |
| horizontal field of view (radians) | |
| const float | CameraERS2xx::CameraVertFOV = 47.8f/180*static_cast<float>(M_PI) |
| vertical field of view (radians) | |
| const float | CameraERS2xx::CameraFOV = CameraHorizFOV |
| should be set to maximum of CameraHorizFOV or CameraVertFOV | |
| const unsigned int | CameraERS2xx::CameraResolutionX = 176 |
| the number of pixels available in the 'full' layer | |
| const unsigned int | CameraERS2xx::CameraResolutionY = 144 |
| the number of pixels available in the 'full' layer | |
| const char | CameraERS2xx::CameraModelName [] = "ERS-2xx-Camera" |
| specifies a name of the camera to load calibration parameters into RobotInfo::CameraHomography | |
Detailed Description
Defines some capabilities common to all Aibo robots.
Definition in file CommonERSInfo.h.
Typedef Documentation
| typedef unsigned short word |
otherwise defined in Types.h
Definition at line 7 of file CommonERSInfo.h.