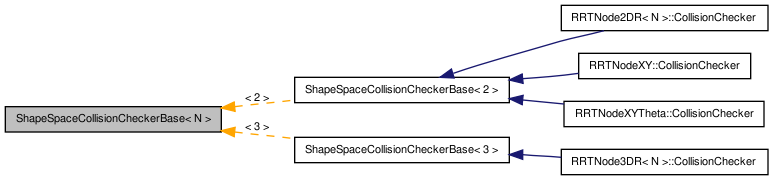
ShapeSpaceCollisionCheckerBase< N > Class Template Reference
Base class for doing collision checking in world shape space. More...
#include <ShapeSpacePlannerBase.h>
Detailed Description
template<size_t N>
class ShapeSpaceCollisionCheckerBase< N >
Base class for doing collision checking in world shape space.
Definition at line 16 of file ShapeSpacePlannerBase.h.
Public Member Functions | |
| ShapeSpaceCollisionCheckerBase (ShapeSpace &shs, const Shape< PolygonData > &_worldBounds, float _inflation) | |
| virtual | ~ShapeSpaceCollisionCheckerBase () |
| const Shape< PolygonData > | getWorldBounds () const |
| BoundingBox< N > | getObstacleBoundingBox () const |
| BoundingBox< N > | getBodyBoundingBox () const |
| void | addObstaclesToShapeSpace (DualCoding::ShapeSpace &shs, const fmat::Transform &t=fmat::Transform()) |
| Debugging tool to make obstacles visible. | |
Protected Member Functions | |
| void | addRobotObstacles (const KinematicJoint &j) |
| Model the robot as a set of PlannerObstacles, based on its kinematic structure. | |
| void | createBodyObstacle (const LinkComponent &j, const fmat::Transform &robotT) |
| void | addDisplayRobotObstacles (const KinematicJoint &j) |
Protected Attributes | |
| DualCoding::Shape < DualCoding::PolygonData > | worldBounds |
| world bounds, must be closed to be used | |
| float const | inflation |
| Amount in mm to add to obstacle bounding shape. | |
| std::vector< PlannerObstacle < N > * > | obstacles |
| world or local map obstacles | |
| std::vector< PlannerObstacle < N > * > | displayWorldObstacles |
| world map obstacles for display | |
| std::vector< PlannerObstacle < N > * > | displayRobotObstacles |
| robot obstacles for display | |
Constructor & Destructor Documentation
| ShapeSpaceCollisionCheckerBase< N >::ShapeSpaceCollisionCheckerBase | ( | ShapeSpace & | shs, | |
| const Shape< PolygonData > & | _worldBounds, | |||
| float | _inflation | |||
| ) |
Definition at line 82 of file ShapeSpacePlannerBase.h.
| ShapeSpaceCollisionCheckerBase< N >::~ShapeSpaceCollisionCheckerBase | ( | ) | [virtual] |
Definition at line 99 of file ShapeSpacePlannerBase.h.
Member Function Documentation
| void ShapeSpaceCollisionCheckerBase< N >::addDisplayRobotObstacles | ( | const KinematicJoint & | j | ) | [protected] |
| void ShapeSpaceCollisionCheckerBase< N >::addObstaclesToShapeSpace | ( | DualCoding::ShapeSpace & | shs, | |
| const fmat::Transform & | t = fmat::Transform() | |||
| ) |
Debugging tool to make obstacles visible.
| void ShapeSpaceCollisionCheckerBase< N >::addRobotObstacles | ( | const KinematicJoint & | j | ) | [protected] |
Model the robot as a set of PlannerObstacles, based on its kinematic structure.
Referenced by ShapeSpaceCollisionCheckerBase< 3 >::addRobotObstacles(), ShapeSpaceCollisionCheckerBase< 2 >::addRobotObstacles(), and ShapeSpaceCollisionCheckerBase< N >::ShapeSpaceCollisionCheckerBase().
| void ShapeSpaceCollisionCheckerBase< N >::createBodyObstacle | ( | const LinkComponent & | j, | |
| const fmat::Transform & | robotT | |||
| ) | [protected] |
Referenced by ShapeSpaceCollisionCheckerBase< 3 >::addRobotObstacles().
| BoundingBox< N > ShapeSpaceCollisionCheckerBase< N >::getBodyBoundingBox | ( | ) | const |
Definition at line 69 of file ShapeSpacePlannerBase.h.
Referenced by ShapeSpacePlannerXYTheta::planPath().
| BoundingBox< N > ShapeSpaceCollisionCheckerBase< N >::getObstacleBoundingBox | ( | ) | const |
Definition at line 56 of file ShapeSpacePlannerBase.h.
Referenced by ShapeSpacePlannerXYTheta::planPath(), and ShapeSpacePlannerXY::planPath().
| const Shape<PolygonData> ShapeSpaceCollisionCheckerBase< N >::getWorldBounds | ( | ) | const |
Definition at line 46 of file ShapeSpacePlannerBase.h.
Referenced by ShapeSpacePlannerXYTheta::planPath(), and ShapeSpacePlannerXY::planPath().
Member Data Documentation
std::vector<PlannerObstacle<N>*> ShapeSpaceCollisionCheckerBase< N >::displayRobotObstacles [protected] |
robot obstacles for display
Definition at line 30 of file ShapeSpacePlannerBase.h.
Referenced by ShapeSpaceCollisionCheckerBase< 2 >::addDisplayRobotObstacles(), and ShapeSpaceCollisionCheckerBase< N >::~ShapeSpaceCollisionCheckerBase().
std::vector<PlannerObstacle<N>*> ShapeSpaceCollisionCheckerBase< N >::displayWorldObstacles [protected] |
world map obstacles for display
Definition at line 27 of file ShapeSpacePlannerBase.h.
Referenced by ShapeSpaceCollisionCheckerBase< N >::ShapeSpaceCollisionCheckerBase().
float const ShapeSpaceCollisionCheckerBase< N >::inflation [protected] |
Amount in mm to add to obstacle bounding shape.
Definition at line 21 of file ShapeSpacePlannerBase.h.
Referenced by ShapeSpaceCollisionCheckerBase< N >::ShapeSpaceCollisionCheckerBase().
std::vector<PlannerObstacle<N>*> ShapeSpaceCollisionCheckerBase< N >::obstacles [protected] |
world or local map obstacles
Definition at line 24 of file ShapeSpacePlannerBase.h.
Referenced by ShapeSpaceCollisionCheckerBase< 2 >::addRobotObstacles(), ShapeSpaceCollisionCheckerBase< 3 >::createBodyObstacle(), ShapeSpaceCollisionCheckerBase< N >::getBodyBoundingBox(), ShapeSpaceCollisionCheckerBase< N >::getObstacleBoundingBox(), ShapeSpaceCollisionCheckerBase< N >::ShapeSpaceCollisionCheckerBase(), and ShapeSpaceCollisionCheckerBase< N >::~ShapeSpaceCollisionCheckerBase().
DualCoding::Shape<DualCoding::PolygonData> ShapeSpaceCollisionCheckerBase< N >::worldBounds [protected] |
world bounds, must be closed to be used
Definition at line 19 of file ShapeSpacePlannerBase.h.
Referenced by ShapeSpaceCollisionCheckerBase< 3 >::getWorldBounds().
The documentation for this class was generated from the following file: