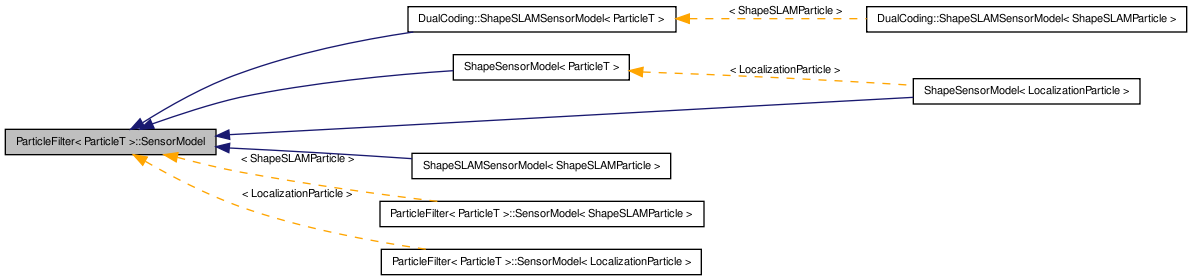
ParticleFilter< ParticleT >::SensorModel Class Reference
A sensor model is used to update particle weights to account based on each particle's ability to explain observations taken from the system. More...
#include <ParticleFilter.h>
Detailed Description
template<typename ParticleT>
class ParticleFilter< ParticleT >::SensorModel
A sensor model is used to update particle weights to account based on each particle's ability to explain observations taken from the system.
Definition at line 132 of file ParticleFilter.h.
Public Types | |
| typedef ParticleT | particle_type |
| redefinition here allows reference to the particle type even if the template parameter may be abstracted away due to a typedef | |
| typedef std::vector < particle_type > | particle_collection |
| the collection type we'll be using to store the particles | |
| typedef particle_collection::size_type | index_t |
| index type for refering to particles within the collection | |
Public Member Functions | |
| virtual | ~SensorModel () |
| destructor (no-op for base class) | |
| virtual void | evaluate (particle_collection &particles, particle_type &estimate)=0 |
| once passed to the particle filter's updateSensors(), this will be called to allow the sensor model to update the 'weight' member of each particle | |
Member Typedef Documentation
| typedef particle_collection::size_type ParticleFilter< ParticleT >::SensorModel::index_t |
index type for refering to particles within the collection
Reimplemented in ShapeSensorModel< ParticleT >, DualCoding::ShapeSLAMSensorModel< ParticleT >, ShapeSensorModel< LocalizationParticle >, and DualCoding::ShapeSLAMSensorModel< ShapeSLAMParticle >.
Definition at line 136 of file ParticleFilter.h.
| typedef std::vector<particle_type> ParticleFilter< ParticleT >::SensorModel::particle_collection |
the collection type we'll be using to store the particles
Reimplemented in ShapeSensorModel< ParticleT >, DualCoding::ShapeSLAMSensorModel< ParticleT >, ShapeSensorModel< LocalizationParticle >, and DualCoding::ShapeSLAMSensorModel< ShapeSLAMParticle >.
Definition at line 135 of file ParticleFilter.h.
| typedef ParticleT ParticleFilter< ParticleT >::SensorModel::particle_type |
redefinition here allows reference to the particle type even if the template parameter may be abstracted away due to a typedef
Reimplemented in ShapeSensorModel< ParticleT >, DualCoding::ShapeSLAMSensorModel< ParticleT >, ShapeSensorModel< LocalizationParticle >, and DualCoding::ShapeSLAMSensorModel< ShapeSLAMParticle >.
Definition at line 134 of file ParticleFilter.h.
Constructor & Destructor Documentation
| virtual ParticleFilter< ParticleT >::SensorModel::~SensorModel | ( | ) | [virtual] |
destructor (no-op for base class)
Definition at line 137 of file ParticleFilter.h.
Member Function Documentation
| virtual void ParticleFilter< ParticleT >::SensorModel::evaluate | ( | particle_collection & | particles, | |
| particle_type & | estimate | |||
| ) | [pure virtual] |
once passed to the particle filter's updateSensors(), this will be called to allow the sensor model to update the 'weight' member of each particle
- Parameters:
-
particles the current set of particles to be evaluated [out] estimate the weighted mean of the particle values
Remember to update each particle's weight, don't overwrite it. In other words, you want to combine (e.g. add or multiply) the weight from the current sensor evaluation with the weight currently stored in each particle, don't just replace it. This is because there may be several sensor updates between resamplings so that particles can be more accurately evaluated.
Implemented in ShapeSensorModel< LocalizationParticle >, and DualCoding::ShapeSLAMSensorModel< ShapeSLAMParticle >.
The documentation for this class was generated from the following file: