RelaxBehavior.cc File Reference
Defines RelaxBehavior, which sets all the PIDs to zero for the tail and legs servos. More...
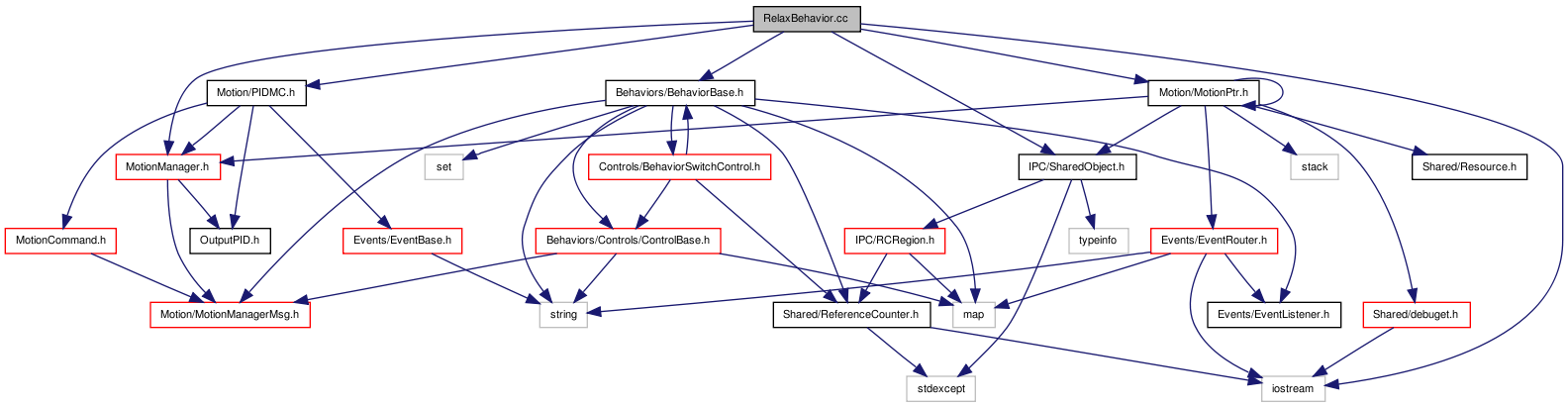
#include <iostream>#include "Behaviors/BehaviorBase.h"#include "Motion/PIDMC.h"#include "IPC/SharedObject.h"#include "Motion/MotionManager.h"#include "Motion/MotionPtr.h"
Include dependency graph for RelaxBehavior.cc:
Go to the source code of this file.
Functions | |
| REGISTER_BEHAVIOR_MENU_OPT (RelaxBehavior,"Background Behaviors", BEH_NONEXCLUSIVE) | |
Detailed Description
Defines RelaxBehavior, which sets all the PIDs to zero for the tail and legs servos.
Definition in file RelaxBehavior.cc.
Function Documentation
| REGISTER_BEHAVIOR_MENU_OPT | ( | RelaxBehavior | , | |
| "Background Behaviors" | , | |||
| BEH_NONEXCLUSIVE | ||||
| ) |