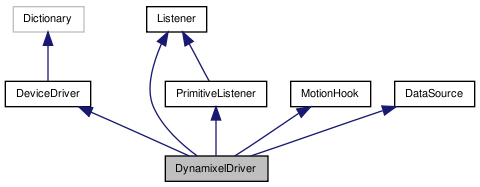
DynamixelDriver Class Reference
description of Dynamixel More...
#include <Dynamixel.h>
Detailed Description
description of Dynamixel
Definition at line 21 of file Dynamixel.h.
Classes | |
| class | CommThread |
| struct | ServoInfo |
| struct | ServoInfoIDSync |
Public Types | |
| enum | ServoParam_t { DYNAMIXEL_P = 0, DYNAMIXEL_I, DYNAMIXEL_D } |
Offsets into OutputPIDs for MX series servos. More... | |
| enum | OldServoParam_t { DYNAMIXEL_SLOPE = 0, DYNAMIXEL_PUNCH, DYNAMIXEL_MARGIN } |
Offsets into OuputPIDs, since Dynamixel AX and RX servos don't actually use PID control, but a different set of parameters. More... | |
| typedef plist::DictionaryOf < ServoInfo >::const_iterator | servo_iterator |
Public Member Functions | |
| DynamixelDriver (const std::string &name) | |
| virtual | ~DynamixelDriver () |
| virtual std::string | getClassName () const |
| Returns the name of the class (aka its type). | |
| virtual MotionHook * | getMotionSink () |
| virtual void | getSensorSources (std::map< std::string, DataSource * > &sources) |
| virtual void | motionStarting () |
| Called when motion process is starting. | |
| virtual bool | isConnected () |
| Should return true if the MotionHook is successfully connected to physical hardware. | |
| virtual void | motionStopping () |
| Called when motion process is stopping. | |
| virtual void | motionCheck (const float outputs[][NumOutputs]) |
| Called each time the motion process has polled active motion commands. | |
| virtual void | updatePIDs (const std::vector< MotionHook::PIDUpdate > &pids) |
| Called when PID values change. | |
| virtual void | registerSource () |
| User hook, called when the data source should claim which outputs it provides feedback (providingOuput()). | |
| virtual void | deregisterSource () |
| User hook, called when the data source should release its claim on outputs with feedback (ignoringOuput()). | |
| virtual void | enteringRealtime (const plist::Primitive< double > &simTimeScale) |
| User hook, called when the controller is going to be running in realtime mode, which is probably the normal mode you'd expect. | |
| virtual void | leavingRealtime (bool isFullSpeed) |
| User hook, called when leaving realtime mode, which means you have no idea when motionCheck() is going to be called in terms of wall-clock time. | |
| virtual unsigned int | nextTimestamp () |
| Returns the simulator time of the next data segment. | |
| virtual const std::string & | nextName () |
| Returns a descriptive name of the next data segment for user feedback (e.g. a filename for logged data). | |
| virtual bool | advance () |
| Called when the simulator is stepping while paused or advancing a frozen data source, return true if successful, or false if no more data is available. | |
| virtual void | plistValueChanged (const plist::PrimitiveBase &pl) |
| virtual void | processDriverMessage (const DriverMessaging::Message &d) |
Public Attributes | |
| plist::DictionaryOf< ServoInfo > | servos |
| Maps servo IDs to Tekkotsu output offsets, use command line new/delete commands to add/remove mappings. | |
| plist::Primitive< std::string > | commName |
| Name of the CommPort to use, generally a SerialCommPort with direct binary TTL communication with the servos. | |
| plist::Primitive< float > | loadCompensation |
| Ratio of load to deflection, if non-zero will use LoadPrediction messages and attempt to counter anticipated loads. | |
| plist::Primitive< unsigned int > | commLatency |
| The delay (in MILLIseconds, ms) to get a response from the servos due to buffering in the USB-to-TTL interface. | |
| plist::Primitive< unsigned int > | numPoll |
| Number of sensor queries to send before reading responses. This lets us front-load the queries so we can get multiple responses per read buffer flush period. | |
| plist::Primitive< unsigned int > | responseTime |
| The amount of time (in MICROseconds, µs) to wait between sending a sensor query and sending another when front-loading the buffer. If this is too short, the next query will collide with the previous response. | |
Static Public Attributes | |
| static const int | START_SERVO_ID = 1 |
| bioloid kits start the id count at 1 | |
| static const unsigned int | UNUSED = plist::OutputSelector::UNUSED |
Protected Member Functions | |
| void | doFreeze () |
| user hook for when frozen is set to true; advance() will be called by simulator at user discretion. | |
| void | doUnfreeze () |
| user hook for when frozen is set to false; if enteringRealtime() has been called then you should resume sending data. | |
| void | provideOutput (unsigned int idx) |
| forwards call to DataSource::providingOutput() if the index is valid | |
| void | ignoreOutput (unsigned int idx) |
| forwards call to DataSource::ignoringOutput() if the index is valid | |
| void | pingServos (bool detectedOnly=false) |
| tests each servo to see if it is connected | |
| void | sendZeroTorqueCmd (CommPort &comm) |
| broadcasts a "relax" command to all servos | |
Static Protected Member Functions | |
| static void | provideValues (const ServoInfo &info, const DynamixelProtocol::ServoSensorsResponse &response) |
| sends servo feedback values into the framework | |
| static void | provideValues (ServoInfo &info, const DynamixelProtocol::AXS1SensorsResponse &response) |
| sends AX-S1 sensor values into the framework | |
| template<class T > | |
| static void | writeSyncEntries (std::ostream &os, const std::vector< T > &entries) |
| sends a series of sync write entries into a stream (adding appropriate header and checksum) | |
Protected Attributes | |
| DynamixelDriver::ServoInfoIDSync | servoIDSync |
| DynamixelDriver::CommThread | commThread |
| bool | motionActive |
| bool | sensorsActive |
| std::string | lastSensor |
Static Protected Attributes | |
| static unsigned int | VOLTAGE_SENSOR_OFFSET = capabilities.findSensorOffset("PowerVoltage") |
| index of the voltage sensor | |
| static unsigned int | TEMP_SENSOR_OFFSET = capabilities.findSensorOffset("PowerThermo") |
| index of the temperature sensor | |
Static Private Attributes | |
| static const std::string | autoRegisterDynamixelDriver = DeviceDriver::getRegistry().registerType<DynamixelDriver>("Dynamixel") |
| holds the class name, set via registration with the DeviceDriver registry | |
Member Typedef Documentation
| typedef plist::DictionaryOf< ServoInfo >::const_iterator servo_iterator |
Definition at line 249 of file Dynamixel.h.
Member Enumeration Documentation
| enum OldServoParam_t |
Offsets into OuputPIDs, since Dynamixel AX and RX servos don't actually use PID control, but a different set of parameters.
- Enumerator:
Definition at line 34 of file Dynamixel.h.
| enum ServoParam_t |
Offsets into OutputPIDs for MX series servos.
- Enumerator:
DYNAMIXEL_P P parameter for PID control.
DYNAMIXEL_I I parameter for PID control.
DYNAMIXEL_D D parameter for PID control.
Definition at line 27 of file Dynamixel.h.
Constructor & Destructor Documentation
| DynamixelDriver | ( | const std::string & | name | ) | [explicit] |
Definition at line 40 of file Dynamixel.h.
| virtual ~DynamixelDriver | ( | ) | [virtual] |
Definition at line 65 of file Dynamixel.h.
Member Function Documentation
| bool advance | ( | ) | [virtual] |
Called when the simulator is stepping while paused or advancing a frozen data source, return true if successful, or false if no more data is available.
Implements DataSource.
Definition at line 166 of file Dynamixel.cc.
Referenced by CommThread::runloop().
| void deregisterSource | ( | ) | [virtual] |
User hook, called when the data source should release its claim on outputs with feedback (ignoringOuput()).
It would be wise to call this from your destructor as well.
Reimplemented from DataSource.
Definition at line 120 of file Dynamixel.cc.
| void doFreeze | ( | ) | [protected, virtual] |
user hook for when frozen is set to true; advance() will be called by simulator at user discretion.
Reimplemented from DataSource.
Definition at line 151 of file Dynamixel.cc.
| void doUnfreeze | ( | ) | [protected, virtual] |
user hook for when frozen is set to false; if enteringRealtime() has been called then you should resume sending data.
Reimplemented from DataSource.
Definition at line 144 of file Dynamixel.cc.
| virtual void enteringRealtime | ( | const plist::Primitive< double > & | ) | [virtual] |
User hook, called when the controller is going to be running in realtime mode, which is probably the normal mode you'd expect.
You might be in realtime mode, but a debugger breakpoint will still pause things, or thread scheduling could hiccup, so try to be robust.
The argument is a reference to SharedGlobals::timeScale, so the data source can subscribe to changes in simulation speed if it can use that information. (We avoid direct dependency on the tekkotsu simulator so this code can be reused for other tools too.)
Reimplemented from DataSource.
Definition at line 86 of file Dynamixel.h.
| virtual std::string getClassName | ( | ) | const [virtual] |
Returns the name of the class (aka its type).
Suggested implementation is to declare a static string member, set it to the result of calling the registry's registerType, and then return that member here
Implements DeviceDriver.
Definition at line 71 of file Dynamixel.h.
Referenced by plistValueChanged().
| virtual MotionHook* getMotionSink | ( | ) | [virtual] |
Reimplemented from DeviceDriver.
Definition at line 73 of file Dynamixel.h.
| virtual void getSensorSources | ( | std::map< std::string, DataSource * > & | sources | ) | [virtual] |
Reimplemented from DeviceDriver.
Definition at line 74 of file Dynamixel.h.
| void ignoreOutput | ( | unsigned int | idx | ) | [protected] |
forwards call to DataSource::ignoringOutput() if the index is valid
Definition at line 399 of file Dynamixel.h.
Referenced by deregisterSource(), and plistValueChanged().
| bool isConnected | ( | ) | [virtual] |
Should return true if the MotionHook is successfully connected to physical hardware.
If relevant, this will only be called after motionStarting() has been called in order to initialize a connection.
This is used mainly to cancel out of the WaitForSensors if all MotionHooks return false. If you are still in the process of connecting or unsure of status, be optimistic and return true. This function will be polled at a coarse rate while blocked on sensors in case of timeouts on the part of the MotionHook render it moot.
Implements MotionHook.
Definition at line 58 of file Dynamixel.cc.
| virtual void leavingRealtime | ( | bool | ) | [virtual] |
User hook, called when leaving realtime mode, which means you have no idea when motionCheck() is going to be called in terms of wall-clock time.
Argument set to true if entering full speed mode, which indicates everything should run at full native "frame rate", and may indicate more data will be processed than normal, CPU speed permitting. However, if false, almost certainly indicates updates will be sparse, trigger by user 'step' commands. May be called multiple times if changing between full-speed mode and paused
A non-realtime mode might be triggered if the user wants to pause the simulator/controller to step through something... No guarantees though! The debugger might catch a breakpoint and stop things, and this won't be called!
Reimplemented from DataSource.
Definition at line 87 of file Dynamixel.h.
| void motionCheck | ( | const float | outputs[][NumOutputs] | ) | [virtual] |
Called each time the motion process has polled active motion commands.
When in realtime mode, this should be called every FrameTime*NumFrames (defined in the RobotInfo) milliseconds if running at full speed. See enteringRealtime() and leavingRealtime().
This default implementation checks to see which outputs have changed value since the last call and passes the summary on to motionUpdated(). lastOutputs will be updated with the new values after the call to motionUpdated().
If you need to process all the outputs on every frame, you only need to override this function. Your subclass doesn't need to call the MotionHook implementation unless you want to have lastOutputs updated for you.
If you only need to process the changed outputs for each frame, override motionUpdated() instead. motionUpdated() is always called for each update, even if there aren't any changes, so you can still use that if there are some outputs which need to be updated every cycle.
Reimplemented from MotionHook.
Definition at line 80 of file Dynamixel.cc.
| void motionStarting | ( | ) | [virtual] |
Called when motion process is starting.
Reimplemented from MotionHook.
Definition at line 20 of file Dynamixel.cc.
Referenced by plistValueChanged().
| void motionStopping | ( | ) | [virtual] |
Called when motion process is stopping.
Reimplemented from MotionHook.
Definition at line 63 of file Dynamixel.cc.
| virtual const std::string& nextName | ( | ) | [virtual] |
Returns a descriptive name of the next data segment for user feedback (e.g. a filename for logged data).
Just use your class name if you don't have a useful name for individual samples.
Implements DataSource.
Definition at line 90 of file Dynamixel.h.
| unsigned int nextTimestamp | ( | ) | [virtual] |
Returns the simulator time of the next data segment.
Should be in the future if nothing new since last data segment, otherwise should be the timestamp of the most recent data segment (older segments are skipped), return -1U if there is no more data
Implements DataSource.
Definition at line 159 of file Dynamixel.cc.
| void pingServos | ( | bool | detectedOnly = false |
) | [protected] |
tests each servo to see if it is connected
Definition at line 273 of file Dynamixel.cc.
Referenced by advance(), motionStarting(), CommThread::plistCollectionEntriesChanged(), CommThread::plistCollectionEntryAdded(), and registerSource().
| void plistValueChanged | ( | const plist::PrimitiveBase & | pl | ) | [virtual] |
Implements PrimitiveListener.
Definition at line 188 of file Dynamixel.cc.
Referenced by registerSource().
| void processDriverMessage | ( | const DriverMessaging::Message & | d | ) | [virtual] |
Implements Listener.
Definition at line 255 of file Dynamixel.cc.
| void provideOutput | ( | unsigned int | idx | ) | [protected] |
forwards call to DataSource::providingOutput() if the index is valid
Definition at line 397 of file Dynamixel.h.
Referenced by plistValueChanged(), and registerSource().
| void provideValues | ( | ServoInfo & | info, | |
| const DynamixelProtocol::AXS1SensorsResponse & | response | |||
| ) | [static, protected] |
sends AX-S1 sensor values into the framework
TODO: let sndCount be mapped to a button instead of sensor to provide events?
Definition at line 705 of file Dynamixel.cc.
| void provideValues | ( | const ServoInfo & | info, | |
| const DynamixelProtocol::ServoSensorsResponse & | response | |||
| ) | [static, protected] |
sends servo feedback values into the framework
Definition at line 666 of file Dynamixel.cc.
Referenced by pingServos(), and CommThread::readResponse().
| void registerSource | ( | ) | [virtual] |
User hook, called when the data source should claim which outputs it provides feedback (providingOuput()).
Does not indicate the data source should start sending updates yet — wait for enteringRealtime() or advance() to be called
Reimplemented from DataSource.
Definition at line 96 of file Dynamixel.cc.
Referenced by plistValueChanged().
| void sendZeroTorqueCmd | ( | CommPort & | comm | ) | [protected] |
broadcasts a "relax" command to all servos
Definition at line 368 of file Dynamixel.cc.
Referenced by motionStopping(), and plistValueChanged().
| void updatePIDs | ( | const std::vector< MotionHook::PIDUpdate > & | pids | ) | [virtual] |
Called when PID values change.
Reimplemented from MotionHook.
Definition at line 89 of file Dynamixel.cc.
| static void writeSyncEntries | ( | std::ostream & | os, | |
| const std::vector< T > & | entries | |||
| ) | [static, protected] |
sends a series of sync write entries into a stream (adding appropriate header and checksum)
Definition at line 408 of file Dynamixel.h.
Referenced by CommThread::updateCommands().
Member Data Documentation
const std::string autoRegisterDynamixelDriver = DeviceDriver::getRegistry().registerType<DynamixelDriver>("Dynamixel") [static, private] |
holds the class name, set via registration with the DeviceDriver registry
Definition at line 424 of file Dynamixel.h.
Referenced by getClassName().
| plist::Primitive<unsigned int> commLatency |
The delay (in MILLIseconds, ms) to get a response from the servos due to buffering in the USB-to-TTL interface.
Definition at line 253 of file Dynamixel.h.
Referenced by deregisterSource(), DynamixelDriver(), CommThread::nextTimestamp(), plistValueChanged(), and registerSource().
| plist::Primitive<std::string> commName |
Name of the CommPort to use, generally a SerialCommPort with direct binary TTL communication with the servos.
Definition at line 251 of file Dynamixel.h.
Referenced by advance(), deregisterSource(), DynamixelDriver(), isConnected(), motionStarting(), motionStopping(), nextTimestamp(), pingServos(), plistValueChanged(), and registerSource().
DynamixelDriver::CommThread commThread [protected] |
Referenced by advance(), deregisterSource(), doFreeze(), doUnfreeze(), motionCheck(), motionStarting(), motionStopping(), nextTimestamp(), pingServos(), plistValueChanged(), and updatePIDs().
std::string lastSensor [protected] |
Definition at line 420 of file Dynamixel.h.
Ratio of load to deflection, if non-zero will use LoadPrediction messages and attempt to counter anticipated loads.
Definition at line 252 of file Dynamixel.h.
Referenced by DynamixelDriver(), and CommThread::setServo().
bool motionActive [protected] |
Definition at line 418 of file Dynamixel.h.
Referenced by deregisterSource(), motionStarting(), motionStopping(), plistValueChanged(), and registerSource().
| plist::Primitive<unsigned int> numPoll |
Number of sensor queries to send before reading responses. This lets us front-load the queries so we can get multiple responses per read buffer flush period.
Definition at line 254 of file Dynamixel.h.
Referenced by deregisterSource(), DynamixelDriver(), plistValueChanged(), registerSource(), and CommThread::runloop().
| plist::Primitive<unsigned int> responseTime |
The amount of time (in MICROseconds, µs) to wait between sending a sensor query and sending another when front-loading the buffer. If this is too short, the next query will collide with the previous response.
Definition at line 255 of file Dynamixel.h.
Referenced by deregisterSource(), DynamixelDriver(), plistValueChanged(), registerSource(), and CommThread::runloop().
bool sensorsActive [protected] |
Definition at line 419 of file Dynamixel.h.
Referenced by deregisterSource(), motionStarting(), motionStopping(), plistValueChanged(), registerSource(), and CommThread::runloop().
DynamixelDriver::ServoInfoIDSync servoIDSync [protected] |
Referenced by DynamixelDriver(), and ~DynamixelDriver().
Maps servo IDs to Tekkotsu output offsets, use command line new/delete commands to add/remove mappings.
Definition at line 248 of file Dynamixel.h.
Referenced by deregisterSource(), DynamixelDriver(), motionStarting(), pingServos(), plistValueChanged(), processDriverMessage(), registerSource(), and ~DynamixelDriver().
const int START_SERVO_ID = 1 [static] |
bioloid kits start the id count at 1
Definition at line 23 of file Dynamixel.h.
Referenced by DynamixelDriver(), pingServos(), and ServoInfo::ServoInfo().
unsigned int TEMP_SENSOR_OFFSET = capabilities.findSensorOffset("PowerThermo") [static, protected] |
index of the temperature sensor
Definition at line 259 of file Dynamixel.h.
Referenced by DynamixelDriver(), and provideValues().
const unsigned int UNUSED = plist::OutputSelector::UNUSED [static] |
Definition at line 24 of file Dynamixel.h.
Referenced by pingServos(), ServoInfo::ServoInfo(), and CommThread::updateCommands().
unsigned int VOLTAGE_SENSOR_OFFSET = capabilities.findSensorOffset("PowerVoltage") [static, protected] |
index of the voltage sensor
Definition at line 258 of file Dynamixel.h.
Referenced by DynamixelDriver(), and provideValues().
The documentation for this class was generated from the following files: