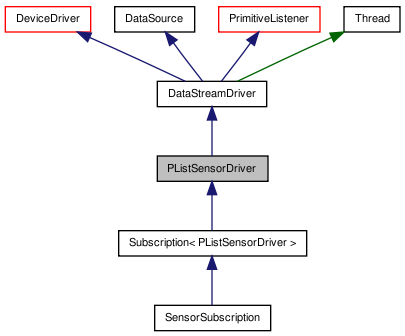
PListSensorDriver Class Reference
Accepts a stream of plist packets, each containing dictionaries for output, button, and sensor values (see DynamicRobotState). More...
#include <PListSensorDriver.h>
Detailed Description
Accepts a stream of plist packets, each containing dictionaries for output, button, and sensor values (see DynamicRobotState).
Definition at line 8 of file PListSensorDriver.h.
Public Member Functions | |
| PListSensorDriver (const std::string &name) | |
| virtual std::string | getClassName () const |
| Returns the name of the class (aka its type). | |
| virtual void | getSensorSources (std::map< std::string, DataSource * > &sources) |
| virtual void | deregisterSource () |
| User hook, called when the data source should release its claim on outputs with feedback (ignoringOuput()). | |
Protected Member Functions | |
| virtual bool | readData (std::istream &is) |
| Called when data should be read from the specified data stream and then provided to the framework. | |
Protected Attributes | |
| bool | providing [NumOutputs] |
| outputs which are being provided by the input stream, so we can claim them and block local feedback | |
Private Member Functions | |
| PListSensorDriver (const PListSensorDriver &) | |
| don't call | |
| PListSensorDriver & | operator= (const PListSensorDriver &) |
| don't call | |
Static Private Attributes | |
| static const std::string | autoRegisterDriver = DeviceDriver::getRegistry().registerType<PListSensorDriver>("PListSensor") |
| holds the class name, set via registration with the DeviceDriver registry | |
Constructor & Destructor Documentation
| PListSensorDriver | ( | const std::string & | name | ) | [explicit] |
Definition at line 10 of file PListSensorDriver.h.
| PListSensorDriver | ( | const PListSensorDriver & | ) | [private] |
don't call
Member Function Documentation
| void deregisterSource | ( | ) | [virtual] |
User hook, called when the data source should release its claim on outputs with feedback (ignoringOuput()).
It would be wise to call this from your destructor as well.
Reimplemented from DataStreamDriver.
Definition at line 11 of file PListSensorDriver.cc.
| virtual std::string getClassName | ( | ) | const [virtual] |
Returns the name of the class (aka its type).
Suggested implementation is to declare a static string member, set it to the result of calling the registry's registerType, and then return that member here
Implements DeviceDriver.
Definition at line 17 of file PListSensorDriver.h.
| virtual void getSensorSources | ( | std::map< std::string, DataSource * > & | sources | ) | [virtual] |
Reimplemented from DeviceDriver.
Definition at line 19 of file PListSensorDriver.h.
| PListSensorDriver& operator= | ( | const PListSensorDriver & | ) | [private] |
don't call
| bool readData | ( | std::istream & | is | ) | [protected, virtual] |
Called when data should be read from the specified data stream and then provided to the framework.
If paceInput is set, your implementation should use readsome() to skim through to the last available data packet, and provide only that data to the framework
Implements DataStreamDriver.
Definition at line 20 of file PListSensorDriver.cc.
Member Data Documentation
const std::string autoRegisterDriver = DeviceDriver::getRegistry().registerType<PListSensorDriver>("PListSensor") [static, private] |
holds the class name, set via registration with the DeviceDriver registry
Reimplemented from DataStreamDriver.
Definition at line 33 of file PListSensorDriver.h.
Referenced by getClassName().
outputs which are being provided by the input stream, so we can claim them and block local feedback
Definition at line 29 of file PListSensorDriver.h.
Referenced by deregisterSource(), PListSensorDriver(), and readData().
The documentation for this class was generated from the following files: